|
MSP技术及其在巷道构造超前探测中的应用
郭立全 张平松
安徽理工大学地球与环境学院,安徽淮南 232001
摘 要:矿井震波超前探测技术(Mine Seismic Prediction)基于反射地震勘探原理,采用巷道多次覆盖观测系统采集地震数据,综合运用了波场矢量合成与分解、横向偏移叠加等处理技术。在实践应用中表明MSP技术是一项可以有效的对掘进巷道前方150m范围内断层等地质异常进行长距离超前探测的实用有效技术。
关键词:MSP技术,观测系统,反射偏移,地质构造,超前探测
巷道在掘进过程中所遇到的断层、陷落柱、煤岩体结构破碎带等不良矿井地质条件时,这些地质异常直接影响掘进施工,同时还控制着矿井水、瓦斯等灾害的发育和发生,给矿井安全生产带来极大的威胁。巷道前方构造及异常探测属于隐伏目标体定位问题,由于巷道内可供观测利用空间位置有限,其探测精度受到井下三维空间的限制,其探测施工和数据解析难度较大,因而要准确的达到预报的要求难度很大,探测结果很难满足各种工程生产技术发展的要求,国家发改委把它作为近年科技攻关的研究重点。矿井震波超前探测技术(MSP),结合巷道空间特点,高倾角界面的波场动力学规律,采用了巷道多次覆盖观测系统进行数据采集,数据处理过程中综合运用了 变换、波场矢量与合成、横向偏移叠加等多种地震数据处理算法,是一种多波多分量全空间地震勘探技术。
1 MSP技术原理
1.1 巷道前方高倾角界面负视速度时距特征[1] ~[2]
由于巷道等地下工程空间局限性,地震探测工作只能在巷道迎头附近有限区域展开,和地面反射地震勘探基于水平或低倾角反射界面不同,巷道前方反射界面与地震测线呈垂直或高倾角空间关系,因此表现出独特的负视速度时距特征。以二层速度模型为例,直达波、反射波时距方程分别为:
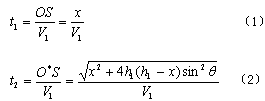
其中t1为直达波时距方程,t2为反射波时距方程,x为激发点距离接收点O的距离,h1为前方界面出露点距离O点距离,V1为第一层介质速度, 角为界面倾角,时距曲线见图1。
由时距曲线可得,当以L代表接收点O距迎头距离,在有限的X区间[0,L]内,:
①高倾角界面的反射波段(图1中的实线部分)仅为整个反射曲线的一部分;②该反射段位于反射曲线极小值点左侧,因此其斜率为负值,即表现出负视速度;③直达波和反射波的交点横坐标恰好等于界面出露点位置。④倾角越大,反射段的斜率越大;⑤当倾角为90º即前方界面为直立界面时,反射曲线为直线,反射波曲线段斜率和直达波斜率大小相等,符号相反。
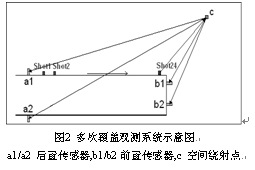
 1.2 MSP技术中的巷道多次覆盖观测系统
为了尽可能多的获取地震数据,MSP数据采集时选用三分量传感器,多个三分量传感器布置在不同位置,在巷道中形成全方位、多次覆盖观测系统。地面地震将界面抽象成光滑水平界面,每个CDP道集代表了某一共深度点多次反射,射线路径遵循镜面反射定理。MSP中将反射界面看成不再光滑而是由一系列离散绕射点所组成,因此该界面能够反射来自任一方向的下行波并且上行波总能被任何位置的传感器所接收。在巷道迎头和后方同时布置多个传感器接收,巷道一帮或两帮激发信号。图2中前后置多次覆盖观测系统是将4只三分量传感器分别布置在巷道两帮和迎头,前后置传感器之间布置炮点。由于炮点和接收点位于全空间介质中,任一炮点所激发的地震波能够被界面上的绕射点反射并为各个传感器所接收。
2 MSP系统组成及现场探测技术
2.1 MSP系统组成
MSP系统主要由采集系统和处理系统两部分组成。为了适应煤矿施工环境,采集系统主机选用福州华虹智能科技开发有限公司最新研制的KDZ1114-6B30型矿井本安地震仪,该款仪器采用先进电子技术与嵌入式操作系统,保证了地震数据的高保真获取及智能管理,系统特点与技术指标如下:
采集通道
通 道 数:采样通道数为6个,1~6道任选;
采样速度:单道最快采样速度为16μS;
A/D:每个通道独立AD,24位
采样间隔:16μS~32MS(以16μS增量可选);
人机接口
操作系统:嵌入Linux;
操作界面:全中文界面;
显 示:夏普800×600 256色真彩;
接 口:1个标准USB接口;
键 盘:专用键盘、通用键盘;
传感器参数
分 量 数:3(迪卡尔积坐标系分布)
类 型:动圈式速度、压电加速度任选
耦合方式:孔中贴壁式机械
适合孔径:42、60(前者为加速度、后者为速度传感器)
响应主率:加速度为0~5000HZ,速度传感器100HZ。
处理系统采用了矿井震波超前探测处理系统(MSP2.0),该处理系统由本课题组集合多年的地震处理软件编制经验和巷道/隧道探测工程实践开发完成的智能化解析软件。适用于矿井巷道、隧道、地铁等地下工程的超前探测处理、解释及地质构造预报。以三维任意观测系统下的Randon变换、偏移速度分析、深度偏移[3]、振动分解与合成等核心算法为基础,实现对坑道前方地质构造及其异常体成像,可获得巷道/隧道前方及周边掘进空间内不同方位的二维地震属性参数剖面,以及三维地震属性数据体。软件系统功能强大,主要有工程管理、记录解编、数据预处理、核心处理、界面提取以及结果显示等6大主模块和20多个功能独立的子模块构成。系统本身采用流程化组织方式,操作便捷,用户交互性强,支持人机连作解释等功能。
2.2 MSP 现场探测技术
MSP系统是针对矿井掘进巷道探测而设计,现场探测技术充分考虑和利用了掘进工作面狭长的特点。现场工作主要包括观测系统布置、激发和接收三部分。
2.2.1 观测系统布置
观测系统首先确定相对坐标原点和角度坐标。原点可设置在巷道中任意位置,但通常做法有两种,一种是将原点设置在迎头断面上中心上,另一种可设计在距离巷道断面一定的距离的后方中心轴线上。三轴指向分别为:X轴水平指向巷道前方,Y轴竖直指向顶板,Z轴水平指向巷道左帮。现场工作时注意测量巷道标志点和本观测系统的相对原点的距离。本系统中的水平方位角自X轴正向起,在水平面(XZ面)内逆时针旋转为正向,角度范围0~360º。确定倾角的原则为以Z轴正向为起点,在竖直平面(YZ)内逆时针为正,角度范围为-90~90 º。
炮点一般设计在巷道左帮,炮点测线尽量避开硐室,叉巷等影响地震波传播的空腔障碍物。炮点自迎头开始布置,炮数20~24个,炮间距1.5~2m ,炮孔深1.5m,,如果测区内松动圈范围较大,可适当加深炮孔;当炮孔不水平时,测量其倾角和方位角。
为了提高信号的质量,接收点应尽量布置在完整性较好岩(煤)体中,尽量避开后方已揭露断层等较松散的地方。接收点分别布置在巷道左帮、右帮和迎头断面上,接收点的位置没有严格的要求,但要注意测量其与上述对点之间的关系,做好记录。孔深1.5米偏移距10~15m。
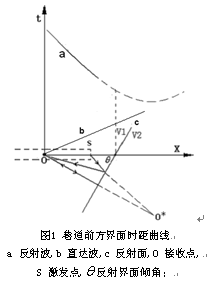
图3 MSP观测系统现场布置
a为激发孔接收孔空间分布示意图 b为接收孔施工示意图 c激发孔施工示意图
2.2.2 激发与接收工作
激发以炸药震源最佳,在不能放炮时可用重锤代替。炸药可选用矿用乳胶炸药,以一段雷管引爆,在没有一段雷管时,可以其它段代替,但一定要选用同一段,以保证触发延迟时间的一致。起爆时一炮一放,顺次激发。
安装时传感器时,以专用的导向杆向传感器推入孔底。向气囊加压驱动机械贴壁片使其和围岩耦合成一体。安装完成后测量传感器三个分量的方位角和倾角。
2.2.3 施工环境要求
MSP施工时要尽量降低现场噪声水平,停止机械震动或较大噪音的工作如:掘进机、皮带,减少人员走动等。减少杂物堆放,以便于现场人员进行数据采集。
3 大统天安矿业公司-870运输顺槽超前探测应用效果分析
大统矿业(集团)天安矿业公司矿区内构造比较复杂、断层较多,为了确保-870运输顺槽巷道前方的掘进顺利,该巷道前方前方断层、破碎带等地质构造的分布及延展情况,采用了MSP技术对前方DF39断层具体位置的探测,测线长度为39米(图4、图5)。
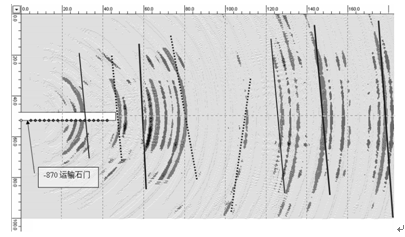
图4 -870运输顺槽MSP超前探测深度偏移剖面
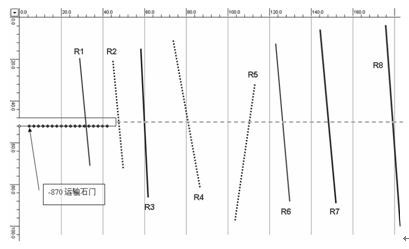
图5 -870运输顺槽MSP超前探测结果解释剖面
探测结论与验证情况
由MSP巷道超前探测结果可得
(1)-870运输石门超前探测偏移剖面中存在8组反射界面,距离YS10点分别为45.0m、63.6 m、78.2 m、95.6 m、125.4 m、143.6 m、163.6 m、193.6 m。
(2)结合地质信息推断前方影响巷道安全掘进异常界面主要有4处:R3(78.2 m)、R6(143.6 m)、R7(163.6 m)、R8(193.6 m), 上述异常界面均发育有断层构造。DF39位于R3(78.2m)处。
经实际掘进验证,R3(DF39断层),R6、R7界面得到很好的预测预报。
4 结论与分析
(1)由于MSP技术直接在矿井巷道中对目标体进行探测,地震子波频率高,提升了对小构造分辨率能力,可作为地面地震勘探有益的补充。
(2)MSP的开发成功与应用进一步丰富了国内巷道长距离超前探测技术。
(3)MSP目前的技术水对界面的走向和倾角参数精度还不够,只能定性分析其性质,需进一步从动力学角度进行分析。
参考文献:
[1] 刘盛东,郭立全,张平松.巷道前方地质构造MSP法超前探测技术与应用研究[J].工程地球物理学报,2006.
[2] 赵永贵,刘浩等.隧道地质超前预报研究进展,地球物理学进展,2003.
[3] 何继善,柳建新.隧道超前探测方法技术与应用研究,工程地球物理学报,2004.
|
|
| 添加日期:2013-11-13
浏览次数:5381 |
|