| |
 |
|
| 巷道随掘超前地质探测技术及应用 |
引言:
巷道超前物探技术一直以来都是保障煤矿安全开采的重要手段。目前的超前物探方法在开展探测时存在两方面问题:
一、影响生产效率:都需要暂停掘进作业以减少掘进机等金属体或机械振动为探测数据带来的影响,无法在掘进的同时边掘边探、随掘随探;
二、探测成果的时效性短,数据量少,无法像监测系统一样实时反应监测地质体的参数变化情况。
国家能源局、国家矿山安全监察局为贯彻落实《关于加快煤矿智能化发展的指导意见》(发改能源﹝2020﹞283号),科学规范有序开展煤矿智能化建设,于2021年6月5日研究制定了《煤矿智能化建设指南》,其核心是实现矿井地质信息的透明化。透明地质是以高精度地质探测和监测技术为核心,以三维地质可视化平台为支撑,建立地质与工程数据动态融合的高精度模型,为智能掘进、智能采煤以及智能安全监控等提供基础地质保障。
因此,需要大力推广智能采掘工作面的随采智能监测、随掘智能探测与监测的技术和装备。
1系统介绍
巷道随掘超前地质探测系统分为井下部分和地面部分,其中,井下部分中包含KJ1465-F矿用本安型微震监测分站、KDW127/18B电源、传感器、光缆、通信电缆、采集电缆等;地面部分由千兆交换机、计算机等组成。井下每个分站可接入16个通道,支持拓展,分站至传感器由矿用防爆通讯电缆连接,为保证系统的正常运行,由KDW127/18B电源能保证系统断电正常运行至少2小时,保证系统正常连续运行。地面部分主要有数据采集分析系统、台式服务器等。
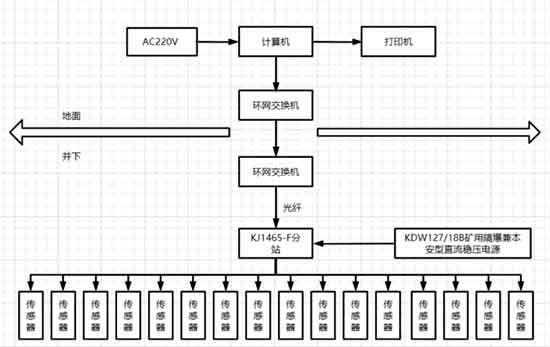 图1-1 系统结构示意图
巷道随掘超前探测指的是在掘进施工的同时进行超前探测工程,实现探掘协调作业,达到对掘进前方地质灾害实时预报的目的,更好地保障掘进安全。
掘进过程中掘进机的截割头切割岩石,产生以S波为主的地震波,此地震波具有一定周期性其周期与截割头转速有关。另一方面,由于截割头的作用使岩石产生破裂和垮落,产生以P波为主的地震波.此地震波的随机性强,震源表现为随机出现的多个脉冲信号。每1个脉冲信号可以看作是1次少量炸药激发的弹性波震源。弹性波在离开震源向外传播的过程中,由于煤层的传导作用形成槽波,具有频散等槽波的基本性质。互相关干涉是将连续震源信号转换为脉冲信号的有效方法。虽然槽波为频散波,但互相关干涉同样适应于频散波。这是由于不同频率正弦波的正交性,不同频率波组的互相关为零,只有相同频率的波组互相关不为零。因此某一道槽波在频率w上谐波分量表示为
其中:x为传播距离;t为传播时长;k是波数;w(k)为震源子波的频谱。而与参考道的地震信号r(xo,to,w)求互相关函数y(x,t,w)为
可以看出互相关函数是1个特殊的地震信号,它的子波是震源子波的自相关函数,而传播距离为参考道与地震道之间的距离x-xo,传播时长为从参考道到地震道的传播时间t-to。由于随掘震源的子波为弱周期信号与随机脉冲信号的叠加,其自相关函数近似于脉冲信号。因此通过互相关可以将连续的随掘地震数据脉冲化为虚拟的单炮记录,其虚拟炮点位于参考道所在的点上。随掘地震波在煤层内传播的过程中.在遭遇断层等地质异常体后产生反射波,反射波沿煤层向回传播被安装在煤层中的传感器接收,因此传感器接收到的既有随掘地震波的直达波又有反射波,如图所示。
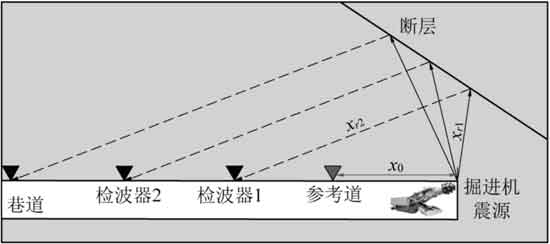 图2-1 随掘反射波示意图
3.巷道随掘超前探测实施方案
3.1 系统布置
3.1.1 采集观测系统:
采集系统采用线性排列观测系统。沿巷道走向布置测点,测点总数14(1个先导三分量检波器,13个单分量检波器),测点间距4m(5个锚杆间排距),位于掘进巷道右侧帮,高度为离底板1.5m,孔深2m,孔向水平垂直于巷帮,孔内塞黄泥。现场观测系统布置必须符合标准化要求,采集线缆挂在侧帮,要求横平竖直。
3.1.2采集系统:
先导传感器:选用三分量检波器,安装在综掘机炮头后方,强磁吸附,接收破岩近源振动信号;
巷帮测点与传感器:采用单分量检波器,黄泥耦合,接收破岩信号;
16通道采集大线:大线每个测点位置有对应的接口,接入振动检波器。
3.2 施工工艺:
最后方的传感器依次随着巷道迎头不断向前推进而滚动前移,每向前掘进20m,将最后方5个传感器至滚动挪移至最前方。
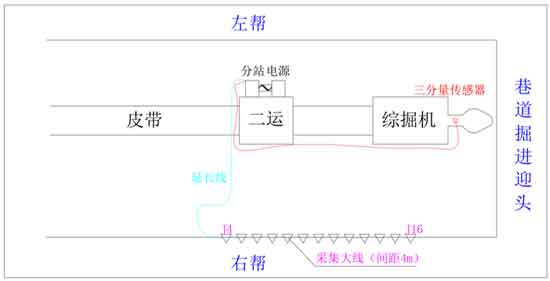 图3-1 现场布置图示
传感器孔施工及技术要求:
(1)位置:位于掘进巷道右侧帮,高度为离底板1.5m的位置(可根据现场情况微调);
(2)孔深:2m;
(3)间距:首次施工时首个传感器距离工作面间距15m,传感器孔间距4m向外依次布置,之后随巷道掘进每隔4m,施工一个传感器孔;
(4)孔向:水平垂直于巷帮;
(5)孔径:50mm(保证能装入传感器),吹净孔中浮煤(碴)。
检波点安装施工及技术要求:
传感器采用孔中耦合方式时,耦合介质选用黄土炮泥,黄土炮泥与水混合之后使用专用的注浆工具把浆液注入到传感器孔中,保证传感器与煤帮耦合;如遇现场传感器孔施工不便时,则采用锚杆耦合的方式,在处于煤层中间的锚杆上,使用转接头将传感器固定在锚杆上,传感器安置方向尽量垂直于煤壁且保证所有传感器方向一致。
4 数据处理与解释
4.1 地震数据处理流程
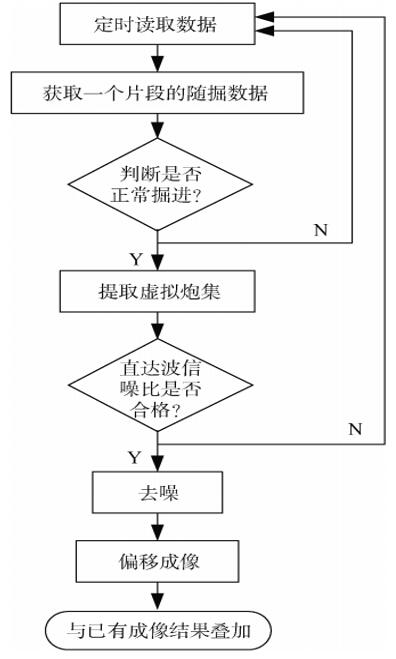 图4-1 地震数据处理主体流程
②数据选择与评价:对采集到的数据进行分析,根据其平均振幅的大小判断掘进机的当前状态是否正常,如果未开机或空转则丢弃当前数据。
③提取虚拟炮集:以距掘进机最近的地震道为参考,采用地震干涉算法将一段时间的连续地震数据转化为虚拟炮集。
④筛选与去噪:以直达波的信噪比为依据,评估虚拟炮集的数据质量,丢弃因掘进机未能有效切割或受其他随机噪声影响而产生的低信噪比虚拟单炮记录,并对筛选的单炮记录进行滤波和去噪。
⑤偏移成像:每产生一个合格的单炮记录之后进行一次偏移成像,按照掘进进尺为每炮记录设置不同权重,采用绕射偏移算法实现掘进机前方和侧前方探测区域的成像。
最终通过偏移成像成果,判别能量高值异常即为地质异常区。
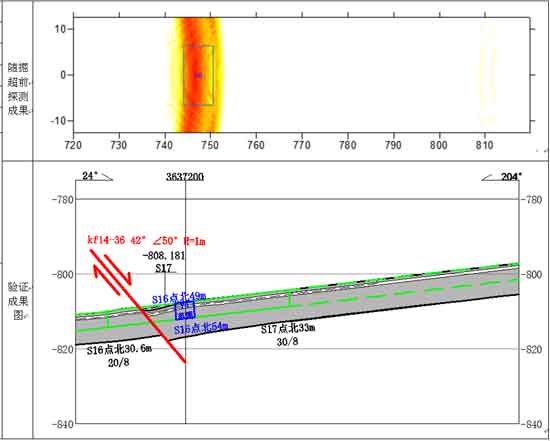
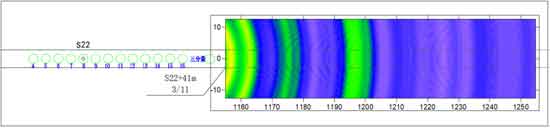 图4-2 地震超前数据处理成果示意图
5 数据成果及验证
Y0异常区验证情况
|
|