
�����ǰ��̽����һֱ�������DZ���ú��ȫ���ɵ���Ҫ�ֶΡ�Ŀǰ�ij�ǰ��̽�����ڿ�չ̽��ʱ�������������⣺
һ��Ӱ������Ч�ʣ�����Ҫ��ͣ�����ҵ�Լ��پ�����Ƚ�������е��Ϊ̽�����ݴ�����Ӱ�죬���ھ����ͬʱ�߾��̽�������̽��
����̽��ɹ���ʱЧ�Զ̣��������٣�������ϵͳһ��ʵʱ��Ӧ��������IJ����仯�����
������Դ�֡����ҿ�ɽ��ȫ����Ϊ�᳹��ʵ�����ڼӿ�ú�����ܻ���չ��ָ�������(������Դ�z2020�{283��)����ѧ�淶����չú�����ܻ����裬��2021��6��5���о��ƶ��ˡ�ú�����ܻ�����ָ�ϡ����������ʵ�ֿ�����Ϣ�����������������Ը߾��ȵ���̽��ͼ�⼼��Ϊ���ģ�����ά���ʿ��ӻ�ƽ̨Ϊ֧�ţ����������빤�����ݶ�̬�ںϵĸ߾���ģ�ͣ�Ϊ���ܾ�������ܲ�ú�Լ����ܰ�ȫ��ص��ṩ�������ʱ��ϡ�
��ˣ���Ҫ�����ƹ����ܲɾ������������ܼ�⡢�������̽������ļ�����װ����
1ϵͳ����
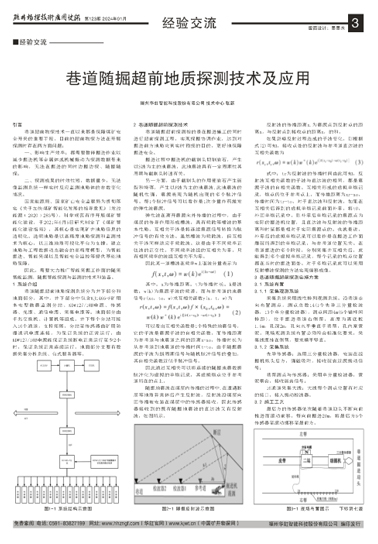
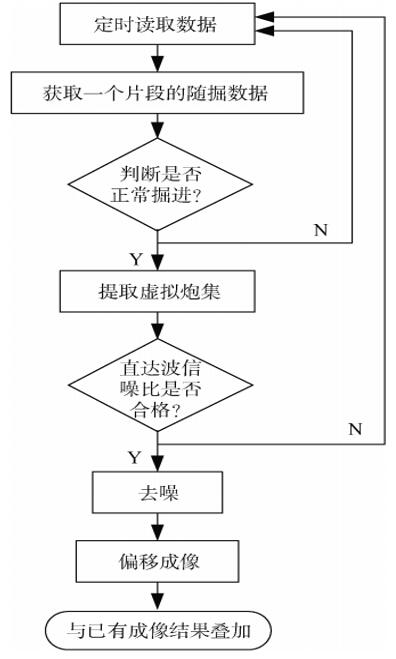
������ǰ����̽��ϵͳ��Ϊ���²��ֺ͵��沿�֣����У����²����а���KJ1465-F���ñ����������վ��KDW127/18B��Դ�������������¡�ͨ�ŵ��¡��ɼ����µȣ����沿����ǧ�����������������ɡ�����ÿ����վ�ɽ���16��ͨ����֧����չ����վ���������ɿ��÷���ͨѶ�������ӣ�Ϊ��֤ϵͳ���������У���KDW127/18B��Դ�ܱ�֤ϵͳ�ϵ�������������2Сʱ����֤ϵͳ�����������С����沿����Ҫ�����ݲɼ�����ϵͳ��̨ʽ�������ȡ�
ͼ1-1 ϵͳ�ṹʾ��ͼ
������ǰ̽��ָ�����ھ��ʩ����ͬʱ���г�ǰ̽��̣�ʵ��̽��Э����ҵ���ﵽ�Ծ��ǰ�������ֺ�ʵʱԤ����Ŀ�ģ����õر��Ͼ����ȫ��
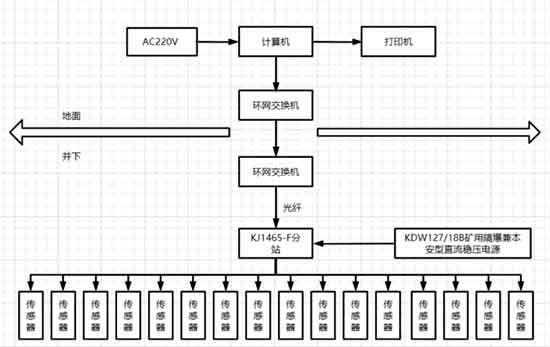
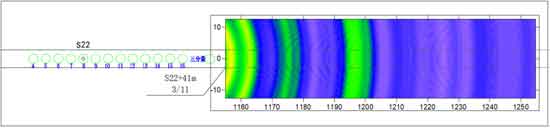
��������о�����Ľظ�ͷ�и���ʯ,������S��Ϊ���ĵ���,�˵�����һ����������������ظ�ͷת���йء���һ����,���ڽظ�ͷ������ʹ��ʯ�������ѺͿ���,������P��Ϊ���ĵ���.�˵��������ǿ,��Դ����Ϊ������ֵĶ�������źš�ÿ1�������źſ��Կ�����1������ըҩ�����ĵ��Բ���Դ�����Բ����뿪��Դ������Ĺ�����,����ú��Ĵ��������γɲ۲�,����Ƶɢ�Ȳ۲��Ļ������ʡ�����ظ����ǽ�������Դ�ź�ת��Ϊ�����źŵ���Ч��������Ȼ�۲�ΪƵɢ��,������ظ���ͬ����Ӧ��Ƶɢ�����������ڲ�ͬƵ�����Ҳ���������,��ͬƵ�ʲ���Ļ����Ϊ��,ֻ����ͬƵ�ʵIJ��黥��ز�Ϊ�㡣���ijһ���۲���Ƶ��w��г��������ʾΪ

ͼ2-1 ����䲨ʾ��ͼ
3.������ǰ̽��ʵʩ����
3.1 ϵͳ����
3.1.1 �ɼ��۲�ϵͳ��
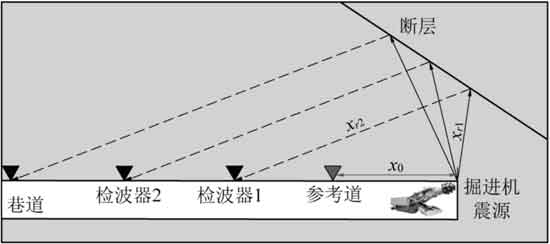
�ɼ�ϵͳ�����������й۲�ϵͳ������������ò�㣬�������14(1���ȵ��������첨����13���������첨��)�������4m(5��ê�˼��ž�)��λ�ھ������Ҳ��,�߶�Ϊ��װ�1.5m������2m������ˮƽ��ֱ�������������ࡣ�ֳ��۲�ϵͳ���ñ�����ϱ���Ҫ�ɼ����¹��ڲ�Ҫ���ƽ��ֱ��
3.1.2�ɼ�ϵͳ��
�ȵ���������ѡ���������첨������װ���۾����ͷ��ǿ���������������ҽ�Դ���źţ�
������봫���������õ������첨����������ϣ����������źţ�
16ͨ���ɼ����ߣ�����ÿ�����λ���ж�Ӧ�Ľӿڣ������첨����
3.2 ʩ�����գ�
��Ĵ����������������ӭͷ������ǰ�ƽ�������ǰ�ƣ�ÿ��ǰ���20m�������5��������������Ų������ǰ����
ͼ3-1 �ֳ�����ͼʾ
��������ʩ��������Ҫ��
(1)λ�ã�λ�ھ������Ҳ��,�߶�Ϊ��װ�1.5m��λ��(�ɸ����ֳ������)��
(2)���2m��
(3)��ࣺ�״�ʩ��ʱ�����������빤������15m�����������4m�������β��ã�֮����������ÿ��4m��ʩ��һ���������ף�
(4)����ˮƽ��ֱ����
(5)����50mm(��֤��װ�봫����)���������и�ú(��)��
�첨�㰲װʩ��������Ҫ��
���������ÿ�����Ϸ�ʽʱ����Ͻ���ѡ�û������࣬����������ˮ���֮��ʹ��ר�õ�ע�����߰ѽ�Һע�뵽���������У���֤��������ú����ϣ������ֳ���������ʩ������ʱ�������ê����ϵķ�ʽ���ڴ���ú���м��ê���ϣ�ʹ��ת��ͷ���������̶���ê���ϣ����������÷�������ֱ��ú���ұ�֤���д���������һ�¡�
4 ���ݴ��������
4.1 �������ݴ�������
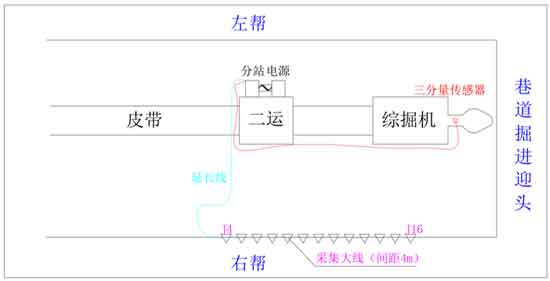
ͼ4-1 �������ݴ�����������
������ѡ�������ۣ��Բɼ��������ݽ��з�����������ƽ������Ĵ�С�жϾ�����ĵ�ǰ״̬�Ƿ����������δ�������ת������ǰ���ݡ�
����ȡ�����ڼ����Ծ���������ĵ����Ϊ�ο������õ�������㷨��һ��ʱ���������������ת��Ϊ�����ڼ���
��ɸѡ��ȥ�룺��ֱ�ﲨ�������Ϊ���ݣ����������ڼ�����������������������δ����Ч�и���������������Ӱ��������ĵ���������ⵥ�ڼ�¼������ɸѡ�ĵ��ڼ�¼�����˲���ȥ�롣
��ƫ�Ƴ���ÿ����һ���ϸ�ĵ��ڼ�¼֮�����һ��ƫ�Ƴ����վ������Ϊÿ�ڼ�¼���ò�ͬȨ�أ���������ƫ���㷨ʵ�־����ǰ���Ͳ�ǰ��̽������ij���
����ͨ��ƫ�Ƴ���ɹ����б�������ֵ�쳣��Ϊ�����쳣����
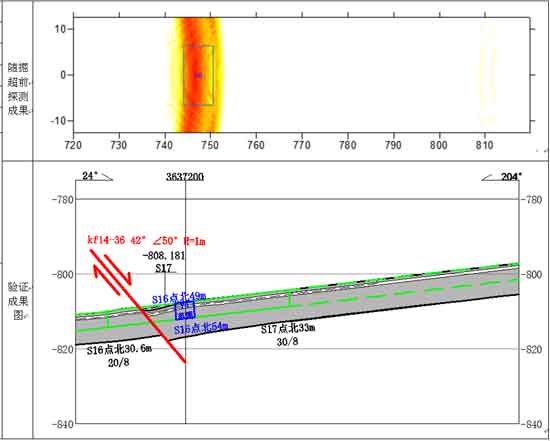
ͼ4-2 ����ǰ���ݴ����ɹ�ʾ��ͼ
5 ���ݳɹ�����֤
Y0�쳣����֤���


 ��һƪ
��һƪ