
关键词:数字矿山;巷道;巷道断面建模法;
1 前言
数字矿山就是实现矿山生产与安全管理的数字化和三维可视化,从而建立数字化、信息化、自动化和智能化的矿山体系平台,巷道作为生产过程中采矿提升、输送工人的通道,以及井下作业、通风和排水等的主要场所,其是数字化矿山组成的重要部分。
本文通过分析总结地下巷道的空间分布特征、巷道建模数据来源和巷道实体组成元素,就巷道断面建模算法{1-5}进行一定的论述。
2 巷道建模
2.1、煤矿井下巷道总体分析
巷道是煤矿井下各种人工要素的主要空间载体,建立巷道的三维模型在井巷工程的设计、安全生产和施工决策等方面有一定的现实指导意义。
巷道作为煤矿井下各种人工要素的主要空间载体,分析巷道自身特点不难发现那些数据对巷道模型建立有用,巷道相对来说其空间区域并不大,简单的理解,他就是一个由长、宽、高组成的体域,其长度和延申方向由布置在巷道内的导线点控制。每一条巷道都布置由巷道导线点,巷道导线点的三维坐标控制着巷道的空间分布和延伸,因此巷道导线点三维坐标信息是巷道建模的重要基础,如果把巷道抽象成一条线,那就是巷道中心线,但是实际的巷道是一个复杂多面体,因此仅用一根中线来描述巷道远远不够。巷道的长、宽、高等断面信息随着巷道性质的不同在不断的变化,因此巷道三维建模还需结合巷道断面数据。
在煤矿实际井巷工程中,不同方位的巷道在空间上的相互关系错综复杂,而就同一巷道而言,由于其开拓过程中地质条件的变化或者生产设计的变更,其巷道方位和断面形态也常常在中段发生变化,因此,如何将巷道断面矢量图元化以及巷道交叉、拐弯、连接等处的平滑处理也是巷道三维建模过程中需要解决的问题。
本文通过分析总结巷道建模数据来源、巷道几何形态和空间分布特征,就利用巷道中心线和巷道断面法建模的方法做一定的阐述。
2.2、巷道中心点线信息的获得
巷道的空间分布和延伸方位由巷道中心线控制,而巷道中心线的三维坐标信息并不能直接获得,在实际的井巷开拓过程中,获得的测量数据为巷道导线点数据,但是,如果把测量导线点在平面上连成一条线,会发现其往往会是一条折线,用它来表示巷道会让巷道发生拐弯,而且,巷道测量导线点并不一定是巷道中心点,因此,在巷道建模的时候,需要利用巷道导线点信息推算巷道中心点信息,然后再将巷道中心点连线。
在井下实际巷道测量时,导线点测量数据包含导线点水平坐标、巷高和导线点处巷道顶板或者底板高程,此外,每一测站还附带测站点距两帮的距离,即帮左帮右,由于巷道的局部空间极小,所以可以认为巷道底板是一个水平面,根据帮左帮右可以求得导线点横向对应的巷道中心点的平面坐标,巷道中心点与巷道导线点的位置极近,巷道中心点的高程坐标可以近似为巷道导线点的高程,这里采用了巷道中心点逼近的思维。
2.3、巷道断面几何图元化
在实际的煤矿巷道开拓中,巷道几何形态由巷道断面形态决定,而巷道断面形态则由巷道支护类型决定,巷道支护类型又由巷道围岩稳定性和使用年限决定。煤矿常见巷道类型有竖井、岩巷、煤巷等,其中竖井断面形态多为圆形,岩巷断面形态多为直壁拱形,煤巷断面形态多为梯形和矩形,如图1所示,一般来说,每条巷道其在开拓过程中都有实际的断面设计参数。
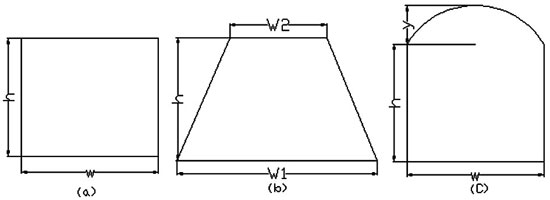
图2-1 巷道断面示意图
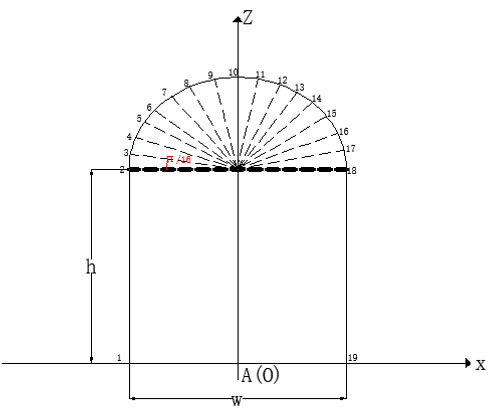
2-2 直臂拱形巷道断面细化图
巷道断面的巷宽、墙高已知,分别为w、h。而由于巷道断面一般围绕巷道中心线对称分布,故A点就是巷道中心节点,设其坐标为(X0,Y0,Z0),则利用w、h便可求得巷道断面上各细化控制点的坐标。为了计算方便,我们在这里先做两个假设前提:
(1)由于巷道局部空间极小,我们可以近似的认为在每个巷道底板中心节点上,其巷道底板为一条与巷道底板中心点等高的水平线,其位于xoy平面上。
(2)默认巷道中心线的方位角为正北方向,即巷道方位角为0°,由于巷道断面与巷道中心线垂直,则建立的初始巷道断面几何图元面与xoz平面平行。
在上述俩个前提上,我们可以利用巷道中心点A的三维坐标分别计算得出巷道断面上各控制点的坐标,分布如下:
2~10#细化点坐标2≤n≤10为
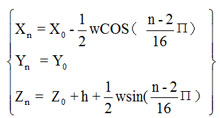 (1)
(1)11~18#细化点坐标11≤n≤18为
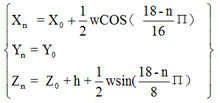 (2)
(2)1#细化点坐标n=1为
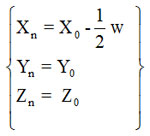 (3)
(3)19#细化点坐标n=19为
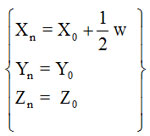 (4)
(4) 利用上述19个控制点可以将巷道断面几何图元化。
2.4、巷道断面旋转
由于默认的初始巷道断面图元与XOZ平面平行,其朝向为正北,而实际的井下巷道具有自己的方位角α,所以在将巷道断面加载到巷道中心节点上时,其巷道断面图元还需要以图2-2中的A-5连线为中轴进行旋转,其旋转角度计算如下:
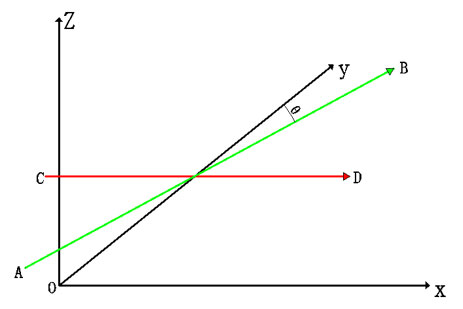
图2-3 巷道中线与巷道断面法线朝向夹角示意图
2.5、旋转后断面各细化点坐标的计算
按前文所述,虽然我们知道了断面加载时旋转的角度,但在软件里要实现这一功能,实际上我们要根据旋转角度计算出旋转后巷道断面各细化控制点的坐标,再按照计算后的坐标将巷道断面几何图元化。由于巷道方位角的角度范围为0~360°,在计算旋转后的巷道断面细化点坐标时,旋转角度在四个象限里的计算方式都不一样,针对于此,本文分别做出计算,如图2-5。
首先,我们将默认的巷道断面细化控制点按照z轴分为两侧,Z轴左侧,即当细化点编号n=(1,2,3,4,5,6,7,8,9)时我们统一将其用一个代表点P表示,Z轴右侧,即当细化点编号n=(11,12,13,14,15,16,17,18,19)时我们统一将其用另一个代表点F表示,而位于Z轴上的细化点10,则在旋转过程中坐标不会变化。由于断面在xoy平面内旋转,所以断面细化控制点旋转后高程值不会改变。
如图2-5所示,当旋转角度θ小于等于 时,P'点的坐标为:
(5)
f'点的坐标为:
(6)
当 <θ≤Π 时,P'点的坐标为:
(7)
f'点的坐标为:
(8)
当Π<θ≤ 时,P'点的坐标为:
(9)
f'点的坐标为:
(10)
当 <θ<2Π时,P'点的坐标为:
(11)
f'点的坐标为:
(12)
将前文中计算得出的巷道断面细化点坐标带入上述公式中便会得出各细化点坐标在旋转后的坐标。
2.6、巷道模型的建立以及展示
单一巷道,由于其断面形状和巷道方位角没有发生变化,变化的只有巷道的空间起伏形态,在巷道建模的时候,在每个巷道变坡点对应的巷道中心线上都添加一个巷道中心节点,所有巷道中心节点与巷道中心线首尾结点便组成了巷道中心线的拓扑组成结构,因此在巷道建模的时候,只需在这些巷道中心结点和节点上加载巷道断面即可,再依次将巷道断面上的巷道细化点按顺序连接成三角网格面,通过对这些三角网格面进行实体填充,便可实现巷道的三维建模。
如下图2-6、2-7。
3、结语
本文针对煤矿巷道三维自动建模可视化的需求,通过对巷道的拓扑组成结构、巷道断面研究,以直臂圆弧拱形断面为例,就巷道中心线加载断面的建模方法原理做了一定概述,并就其应用的算法做了一定的研究。
不过井下巷道关系错综复杂,本文并未针对巷道交叉处建模和巷道交叉处平滑处理等算法做出研究和表述,也并未对实现巷道可视化即巷道漫游的方法原理做出研究,这些需要在以后的工作和学习中不断的深入。
参考文献:
[1] 安葳鹏,蔡治邦.煤矿虚拟巷道三维几何建模的研究[J].微计算机信息, 2010.
[2] 杨超宇.基于GIS的煤矿巷道三维可视化模型构建研究.(Doctoral dissertation, 安徽理工大学).
[3] 张志华,侯恩科.矿山巷道三维模型的建立方法研究[C]陕晋冀煤炭学会地质测量专业学术研讨会论文集.2006.
[4] 李建忠.虚拟矿山中巷道的三维建模研究[J].煤炭工程,2009.
[5] 陈良周.矿山巷道三维自动建模技术研究. 昆明理工大学,2009.
[6] 刘安强,王子童.煤矿三维地质建模相关技术综述[J].能源与环保,2020.

 下一篇
下一篇